
熱線電話
191-2198-6111

由于電抗式步進(jìn)電動(dòng)機(jī)的工作原理,電抗式步進(jìn)電動(dòng)機(jī)的原理相對簡單。下面描述三相無功步進(jìn)電動(dòng)機(jī)的原理。
1、結(jié)構(gòu):電動(dòng)機(jī)的轉(zhuǎn)子中均勻分布著許多小齒,定子齒上有三個(gè)勵(lì)磁繞組電阻,其幾何軸與轉(zhuǎn)子齒的軸交錯(cuò)。 0、1/3 2、2/3((兩個(gè)相鄰轉(zhuǎn)子的齒軸之間的距離是齒距,用denoted表示)。換句話說,A與齒1對齊,而B與齒1對齊。右側(cè)C和齒3向右偏移2/3,A"與齒5對齊。 (A"是A,齒5是齒1)以下是定子的放大圖。轉(zhuǎn)子:
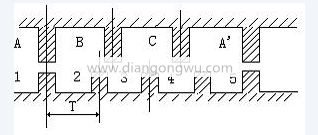
2、旋轉(zhuǎn):如果A相通電,而B相和C相未通電,則齒1在磁場的作用下與A對齊(即使未向轉(zhuǎn)子施加力,該齒也適用)。當(dāng)B相通電時(shí),如果A相和C相未通電,則齒2應(yīng)與B對齊。此時(shí),轉(zhuǎn)子向右移動(dòng)1/3,No.3和C的偏移為1/3,齒4和A的偏移(て-1/3て)=2/3て。如果C相通電而A相和B相均未通電,則齒3應(yīng)與C對齊。此時(shí),轉(zhuǎn)子向右移動(dòng)1/3,第4號和A的偏移為1/3。種類。如果給相A通電而未給相B和C通電,則齒4與A對齊,并且分別向A,B,C和A分別給齒4供電后,轉(zhuǎn)子向右移動(dòng)1/3。前進(jìn)到A相時(shí),電機(jī)轉(zhuǎn)子向右旋轉(zhuǎn)一個(gè)螺距,如果一直按住A,B,C,A .則電機(jī)向右旋轉(zhuǎn)每步(每個(gè)脈沖)1/3て。按A,C,B,A .接通電源,電動(dòng)機(jī)將反轉(zhuǎn)。可以看出,電動(dòng)機(jī)的位置和速度與導(dǎo)通數(shù)(脈沖數(shù))和頻率一對一對應(yīng)。方向由導(dǎo)電順序決定。但是,它考慮了扭矩,穩(wěn)定性,噪音和角度減小。通常使用A-AB-B-BC-C-CA-A的電導(dǎo)率狀態(tài),因此每個(gè)步驟的原始1/3更改為1/6。即使通過兩相電流的不同組合,1/3也會(huì)變成1/12、1/24,這成為電動(dòng)機(jī)分壓驅(qū)動(dòng)的基本理論基礎(chǔ)。不難推理。電機(jī)定子的勵(lì)磁繞組為m相,其軸線與轉(zhuǎn)子齒軸線的偏移量為1/m,2/m .(m-1)/m,1。并且根據(jù)一定的相序?qū)щ姡梢詫﹄妱?dòng)機(jī)進(jìn)行正向和反向控制。 ——這是步進(jìn)電機(jī)旋轉(zhuǎn)的物理?xiàng)l件。 只要滿足該條件,理論上我們就可以制造任何階段的步進(jìn)電機(jī),并且由于成本和其他考慮,市場上通常有2、3、4、5或更多階段。
3、力矩:當(dāng)電動(dòng)機(jī)通電時(shí),在定子和轉(zhuǎn)子之間會(huì)產(chǎn)生磁場(磁通量Ф)。當(dāng)轉(zhuǎn)子和定子錯(cuò)開一定角度時(shí),力F為(dФ/dθ)
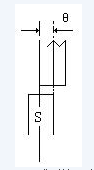
磁通量Ф=Br * S Br是磁密度,S是磁性區(qū)域,F(xiàn)與L * D * Br成正比,L是鐵芯的有效長度,D是轉(zhuǎn)子直徑。 Br=N·I/RN·I是安培匝數(shù)(電流乘以匝數(shù))R是磁阻。扭矩=力*半徑扭矩與電動(dòng)機(jī)的有效體積成比例。 *安培旋轉(zhuǎn)*磁密度(僅考慮線性狀態(tài))因此,電動(dòng)機(jī)的有效體積越大,勵(lì)磁安培旋轉(zhuǎn)的次數(shù)就越大。定子和轉(zhuǎn)子之間的氣隙越小,電動(dòng)機(jī)轉(zhuǎn)矩越大,反之亦然。
公司地址 : 上海市嘉定區(qū)寶安公路2999弄
公司郵箱 : 19121986111@163.com
公司電話 :?021-6992-5088
