
熱線電話
191-2198-6111

伺服電機正反轉控制是指通過改變電機的電流方向,使電機運轉方向發生改變。伺服電機是一種具有高精度、高可靠性的電機,廣泛應用于機械制造、自動化控制和電子設備等領域。在實際應用中,伺服電機正反轉控制是必不可少的,本文將詳細介紹伺服電機正反轉控制的方法。
一、伺服電機的基本原理
伺服電機是一種具有閉環控制功能的電機,其基本原理是將電機的轉速、位置等參數進行反饋控制,使電機的運動狀態達到設定值。伺服電機通常由電機、編碼器、控制器等組成。電機是伺服電機的核心部件,編碼器用于反饋電機的位置信息,控制器則負責控制電機的運動狀態。
二、伺服電機正反轉控制的方法
伺服電機正反轉控制的方法主要有以下幾種:
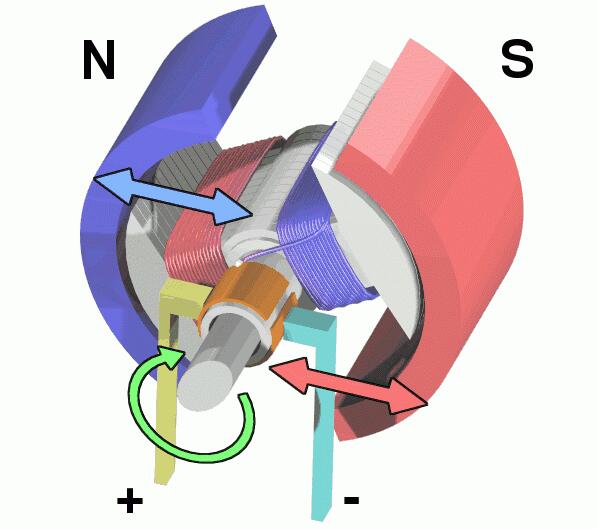
1.改變電機的電流方向
伺服電機正反轉控制最簡單的方法是通過改變電機的電流方向來實現。當電流方向為正時,當電流方向為負時,改變電流方向的方法有兩種:一種是通過改變電源的正負極來改變電流方向,另一種是通過電機驅動器內部的電路來改變電流方向。
2.改變編碼器的反饋信號
伺服電機正反轉控制的第二種方法是通過改變編碼器的反饋信號來實現。當編碼器的反饋信號為正時,當反饋信號為負時,改變編碼器反饋信號的方法有兩種:一種是通過改變編碼器的接線方式來改變反饋信號的極性,另一種是通過編碼器的軟件設置來改變反饋信號的極性。
3.改變控制器的輸出信號
伺服電機正反轉控制的第三種方法是通過改變控制器的輸出信號來實現。當控制器的輸出信號為正時,當輸出信號為負時,改變控制器輸出信號的方法有兩種:一種是通過改變控制器的參數設置來改變輸出信號的極性,另一種是通過改變控制器的控制方式來改變輸出信號的極性。
三、伺服電機正反轉控制的注意事項
在進行伺服電機正反轉控制時,需要注意以下幾點:
1.控制器的參數設置要正確
控制器的參數設置對伺服電機的正反轉控制非常重要,需要根據實際情況進行調整。如果參數設置不正確,可能會導致電機運轉不穩定、速度不一致等問題。
2.電機驅動器的選型要合適
電機驅動器是伺服電機正反轉控制的核心部件,需要根據電機的參數進行選型。如果選型不合適,可能會導致電機無法正常運轉或者損壞。
3.編碼器的安裝要正確
編碼器是伺服電機反饋控制的重要部件,需要根據電機的安裝方式進行選擇和安裝。如果安裝位置不正確或者安裝不牢固,可能會導致編碼器反饋信號不準確。
4.電路的連接要牢固可靠
伺服電機正反轉控制的電路連接需要牢固可靠,避免接觸不良或者斷路等問題。在連接電路時,需要注意接線的正確性和牢固性。
伺服電機正反轉控制是伺服電機運轉的基本功能之一,對于實現伺服電機的自動化控制非常重要。本文詳細介紹了伺服電機正反轉控制的方法和注意事項,希望能為伺服電機的應用和開發提供參考和幫助。
公司地址 : 上海市嘉定區寶安公路2999弄
公司郵箱 : 19121986111@163.com
公司電話 :?021-6992-5088
